
Introduction — a small strange scene
I once watched a grad student whisper to a tiny skull under a lamp, as if negotiating with a stubborn clockwork bird. The room hummed with chargers and edge computing nodes, and the table was scattered with tiny screws, microdrives, and a worn lab notebook. In that quiet, the idea of an automated stereotaxic Instrument felt like a myth made practical: a tool to translate human intention into sub-millimeter action. Data tells us labs using automation can cut setup time by half and improve repeatability by 30–50% (numbers vary by study and setup). So here’s the question I keep asking: how do we move from hopeful tinkering to reliable, everyday practice for scientists and technicians alike? I want to explore that with you—no jargon first, just the real problems and the tools we reach for.
I say “we” because I’ve been in the room while those devices failed and while they shone. I care about things like cranial stabilization and stereotaxic coordinate system mapping because they are the quiet gatekeepers of good data. You’ll see me call out servo motors, power converters, and calibration drift below — not to impress, but because those parts decide if your experiment hums or hollers. My aim is simple: I want to pull back the curtain so you can see what matters, and then judge for yourself. Onward to the messy middle — where old habits meet new tech, and where most projects stall.
Part 2 — Why the old ways trip us up (technical take)
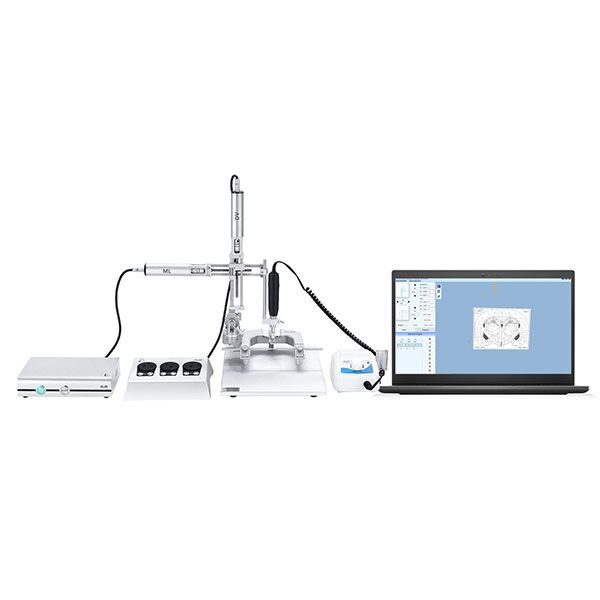
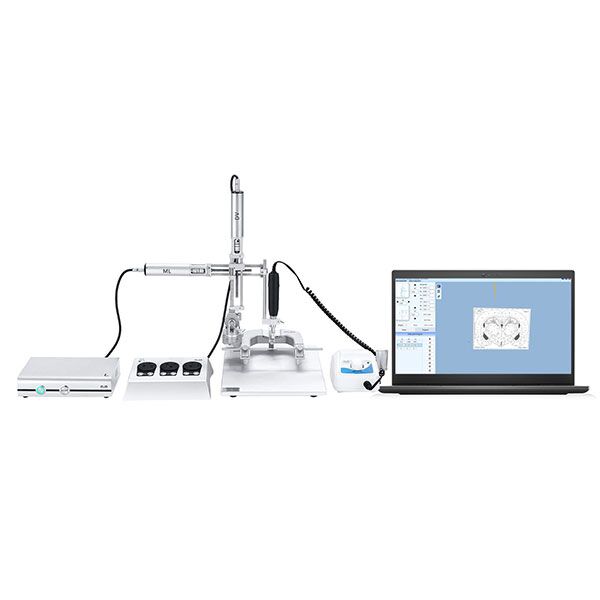
When I look at a traditional stereotaxic apparatus, I see a system built around manual skill. That skill matters; I’m not dismissing it. But manual frames and hand-driven micrometers rely on human steadiness, and humans tire. The result: subtle placement errors, inconsistent depth control, and long setup times. From a technical standpoint, two core failure modes repeat: mechanical backlash in microdrives and drift in coordinate mapping. Backlash introduces step error; drift shifts your reference frame over days. Combine those with variable cranial stabilization and you get wasted animals, repeated runs, and frustrated teams.
Let’s be blunt — calibration is often a ritual, not a solved process. Look, it’s simpler than you think to underestimate how quickly a tiny misalignment multiplies into bad data. If you ignore servo motor hysteresis or assume your power converters will give steady voltage forever, you court surprises. I’ve seen labs patch solutions with shims, duct tape, and late-night prayers. Those ad hoc fixes can work once. They rarely scale. From a systems view, you need robust feedback (real-time position sensing), consistent actuation (low-hysteresis drives), and clear coordinate transforms. Those three components are the difference between a fiddly tool and a lab instrument you trust.
Is this really just human error?
No. Human error is part of the picture, but hardware limits, software calibration, and procedural ambiguity do most of the damage. You can mitigate many issues with better design: closed-loop control, repeatable fixtures, and digital records—then train people to use them well.
Part 3 — Looking ahead: adoption, principles, and metrics
I want to shift from diagnosis to what I’d do next if I were building a reliable pipeline. First, consider the new principles that matter: closed-loop positional feedback, modular microdrive design, and interoperable software that records a stereotaxic coordinate system for every run. These are not buzzwords; they are practical guardrails. A modern stereotaxic apparatus that integrates real-time encoders and simple GUI-driven routines cuts training time and reduces variability. That’s a tangible win for any lab budgeting for reproducible results.
Next, think about a practical future: imagine a lab where a junior tech can set up an implant in half the time it used to take, and the principal investigator trusts the logged coordinates because the system archives them automatically. That future needs edge computing nodes for local processing, easy-to-service power converters, and consumables designed for repeatability. I’m excited by systems that blend mechanical robustness with smart software. — funny how that works, right? You end up needing both the craftsman’s eye and the engineer’s checklist.
What’s next for teams and tools?
Here’s what I advise when you evaluate new solutions. These three metrics will tell you more than glossy demos:
1) Repeatability: Can the system return to the same coordinates within your tolerance over many cycles? Measure this with a simple test protocol and log the variance.
2) Traceability: Does the instrument record calibration steps, power events, and coordinate transforms so you can audit a run later?
3) Maintainability: Are consumables and drives modular and serviceable without a full teardown?
I’ve walked teams through upgrades where small choices made the biggest difference. You don’t need the fanciest bells to improve outcomes; you need the right mix of feedback, control, and habit. Choose tools that respect both the craft and the science. If you want a starting point to compare hardware and workflows, check out BPLabLine — their offerings helped several labs I know move from “good enough” to reliably excellent.